
COTS Journal reports that Boeing has selected the Aonix PERC Java J2SE-based, real-time embedded Virtual Machine (VM) for the Joint Unmanned Combat Air Systems’ (J-UCAS) X-45C program.
The multi-billion dollar J-UCAS program is a joint Defense Advanced Research Projects Agency (DARPA), U.S. Air Force and Navy effort to create UAVs deployable from land bases or aircraft carriers, with stealth characteristics and a range and weapons load that approaches current manned fighters. Both Boeing (X-45C) and Northrop-Grumman (X-47B Pegasus) are submitting and testing designs, but all J-UCAS platforms will employ a Common Operating System (COS) integrating the system components. As DARPA notes:
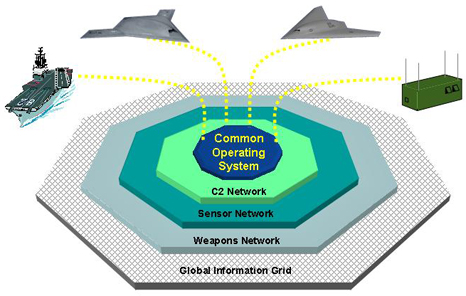
“The Common Operating System is NOT a single monolithic software application hosted on a central processing element within J-UCAS. It’s not like UNIX, LINUX, or any of the available embedded operating systems. It does not manage and control resources such as hard drives, network cards, and keyboards as one would expect of these typical operating systems. In the case of the J-UCAS Common Operating System, the resources that it controls and manages are the specific components within J-UCAS. For example, the weapons, sensors, communication links and even the air vehicles that carry these subsystems.
Unmanned systems are often described as an air vehicle segment and the ground control segment with an overlaying level of integration that is required to make it all work together. The software that enables these elements to operate together is traditionally developed in discrete pieces. In J-UCAS, the connect-the-dots portion of the system is treated as a single, integrating entity referred to as the Common Operating System. Anything that reaches beyond the individual platforms is part of this Common Operating System. The Common Operating System encompasses all the software and the algorithms that provide for command and control, communications management, mission planning, much of the interactive autonomy, the human systems interface and the many other qualities associated with each of these.”
Read more here. DID has expressed some concern over the J-UCAS’ program’s ambitious goals and level of development risk before, and DARPA’s explanation of the COS may help readers gain some additional perspective around the development risk angle.
Boeing obviously believed that the networking capability, security and portability of the Java language made it a good fit for large-scale networked applications such as J-UCAS. PERC is a clean-room virtual machine created expressly for embedded and real-time systems requiring Java J2SE support. The Aonix PERC environment has the ability to support VxWorks 6.x, offers proven mission-critical reliability, and features the ability to guarantee compliance with real-time constraints.
A recent DARPA news release notes the transition of the overall program from a DARPA R&D effort to a formal joint service active development program. Assembly of the first two Boeing X-45C vehicles is currently underway in St. Louis, MO, and they are on schedule for first flight in Spring 2007. The Northrop-Grumman X-47 program has begun initial carrier integration testing and will be conducting the critical design review of its X-47B Pegasus air vehicles in May 2006. The middleware for the first build of the COS software, meanwhile, has been delivered to the Government and initial demonstrations are scheduled for December 2005.
The goal is a robust Operational Assessment that can begin in 2007.